
{kind=link}
quad build progress update:
DONE:
- figure out locations for everything
- solder ESC's and mount motors
- 3d print both propguards
- LiPo leads, connector and smoothing cap
TODO:
- connect camera, VTX, receiver to flight controller
- receive the right propellors, and longer screws for the motors+propguards (tomorrow most likely)
- finish PCB designs for VTX+receiver mount and decorative backside (soon(tm))
- receive new transmitter, and swap out the corresponding receiver (soon(tm))
{kind=link}
{kind=link}
Follow
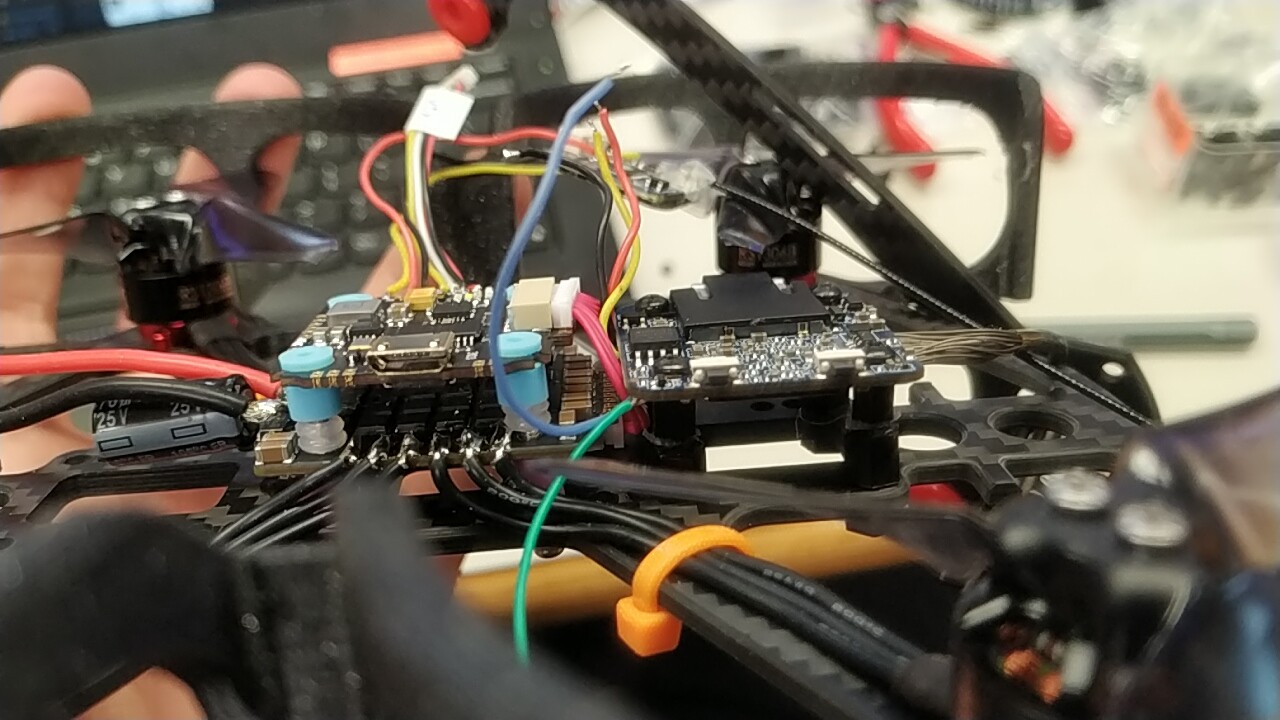
cut and glued some M3 standoffs to fit under the M2 standoffs the runcam (right board) came with. Now they don't push into eachother anymore :D
{kind=link}
